开启辅助访问
切换到宽版
登录
注册(请务必填写正确的邮件地址,否则无法通过验证)
只需一步,快速开始
手机号码,快捷登录
色艺社区
BBS
最新模特
APP下载
搜索
搜索
本版
用户
深圳色艺人体摄影网
»
色艺社区
›
技术交流区
›
摄影技巧
›
如何创建全景影像
返回列表
发新帖
如何创建全景影像
[复制链接]
2875
|
0
|
2009-1-27 18:24:48
|
显示全部楼层
|
阅读模式
马上注册登陆,显示高清大图
您需要
登录
才可以下载或查看,没有账号?
注册(请务必填写正确的邮件地址,否则无法通过验证)
×
“缝合”这一术语表示利用软件,以电子方式将多个影像连接在一起制成较大影像。当以数字方式缝合全景影像时,拍摄的影像边缘必须完全重合,歪斜的相机会使最终影像的接缝不整齐。如果所有照片均以相同的曝光和白平衡设定拍摄,则最终影像效果会非常好,否则会出现亮度和色彩接缝。虽然这可使用软件纠正,但是在拍摄时就纠正,效果将会更好。有些COOLPIX相机具有全景助理场景模式,可自动调节曝光和白平衡,如果没有此模式,则需要手动调整这些设定。
创建远距离物体的全景影像相对容易,以下是使用ArcSoft的“PanoramaMaker”软件将四个独立影像缝合在一起的影像例图。只要在用相机拍照时将单个影像很好地对齐(务必使相机与地面保持水平),软件即可创建完美的全景影像。
登录/注册后可看大图
但是,拍摄前景和背景中物体的全景影像非常困难。为了消除视差错误,必须找出其光学中心(或“节点”)。以下例图显示拍摄前景和背景物体时出现的视差错误(数码相机固定在三脚架上,并从相同位置拍摄A和B影像。)。
·A影像
- 相机朝向背景中的教堂,前景中有一棵树。
·B影像
- 相机在三脚架上转向左侧,因此只能看到教堂的左侧,但是前景中的树“似乎”相对于教堂的位置发生移动。
·C影像
- 使用全景处理软件以电子方式缝合影像,但由于前景中的树“似乎”相对于教堂的位置发生移动,所此它出现了两次。
此错位现象叫作“视差错误”,当将影像缝合在一起时,缝合影像的全景软件将无法纠正此错误。
登录/注册后可看大图
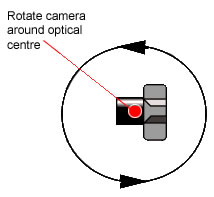
要纠正此错误,必须沿镜头的光学中心(或节点)旋转相机。镜头的节点是光路径在聚焦于相机感光器或胶片平面之前,在镜头中汇聚的一点。以三脚架插座为中心旋转相机几乎肯定会导致视差错误,因此需要先找到节点,然后固定相机,再以该节点为中心旋转相机。
登录/注册后可看大图
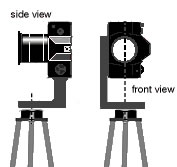
可借助全景云台将相机固定在三脚架上,这些云台可以固定相机,允许位置上的调整,并沿相机/镜头的光学中心旋转相机/镜头。全景云台制造商的例子有Kaiden和Manfrotto。
节点可认为是从前端镜头表面到镜头光学中心的度量,尼康不公布此信息,但可以通过以下步骤找到近似的节点。在使用全景云台进行正确定位时,请确定三脚架是固定的,仅相机可移动。
1.
将相机安装在中央
确定相机镜头正好在旋转点的上方,这一点可从前端观看安装在三脚架上的相机来进行检查。
登录/注册后可看大图
2.
调节视差错误
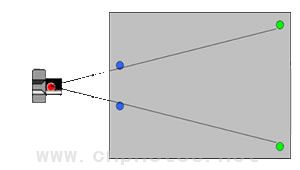
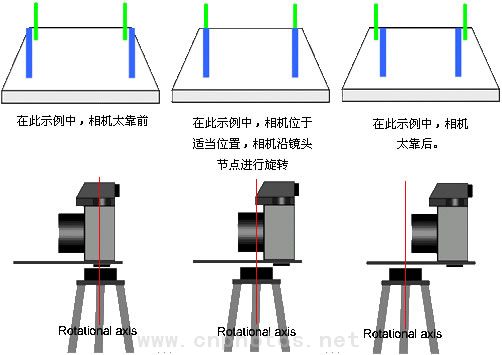
要找到并纠正视差错误,请使用相机、带全景云台的三脚架、一张桌子和四支笔(最好使用可以自行竖立起来的“麦克”笔)进行下述操作。如例图中所示放置四支笔。用全景云台将相机安装在三脚架上,使最近和最远的笔可同时在相机的LCD显示屏(或取景器,如果使用的是SLR)上看到。前面的笔应比后面的笔靠前。
登录/注册后可看大图
登录/注册后可看大图
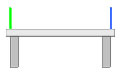
从上面和旁边观看桌子时所显示笔的位置
使相机LCD显示屏或SLR取景器与笔成一直线观看,然后从左向右平移相机以使笔在相机LCD显示屏中从左侧移至右侧,在平移相机时注意各支笔之间的相对移动。用全景云台将相机后移或前移,直到在平移时各笔之间的相对移动消失。
登录/注册后可看大图
3.
将相机调水平
使用三脚架上的水平仪进行调校,如果没有水平仪,请使用一个小的附加水平装置。
回复
使用道具
举报
提升卡
置顶卡
沉默卡
喧嚣卡
变色卡
显身卡
返回列表
发新帖
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
注册(请务必填写正确的邮件地址,否则无法通过验证)
本版积分规则
发表回复
回帖后跳转到最后一页
firewall
回复楼主
返回列表
摄影入门
摄影技巧
后期处理
图文推荐
【广州】●【2013.01.18】瑜伽人体“穎兒”周五广州活动安排!
2013-01-15
【私拍】丰乳肥臀,E杯波霸“Amy”20号开始浙江可以约拍![浙江]
2021-11-16
【私拍】目前朱美美在上海可以约拍(仅一周)![上海]
2021-11-16
这身材了得!
2011-04-08
【老狼作品】第三辑:最最完美的小敏
2012-11-03
热门排行
1
“深圳色艺”拍摄活动规则
2
36D胸模 - 依依 - 猛图40余张 - 内衣 、拳
3
籽艺
4
怎样成为认证会员?
5
大美女 - 艺艺 - 最后一击 - !!! 珍藏版 !!
6
【老狼作品】第三辑:最最完美的小敏
7
【老狼作品】第一辑:最最可爱的小敏
8
依依 - 猛图25张 - 电死人不偿命哈 - Andre
9
深圳色艺VIP制度实施细则
10
这身材了得!
 |手机版|小黑屋|深圳色艺
|手机版|小黑屋|深圳色艺

![【私拍】丰乳肥臀,E杯波霸“Amy”20号开始浙江可以约拍![浙江]](data/attachment/block/d8/d805d5de399e98beb89690a8af9457a5.jpg)
![【私拍】目前朱美美在上海可以约拍(仅一周)![上海]](data/attachment/block/67/6755b8ca77fb2b753e72c412a4f8baa5.jpg)








 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 显身卡
显身卡